When time-varying model results are mapped onto a finer scale DTM (eg ALS or detailed survey), often the size of the mapped files can grow into several gigabytes very quickly. With hundreds of time-steps, even model files of several megabytes can become unwieldy after mapping onto the DTM. The large file size makes storage and transfer of these model results difficult.
Mapping on-the-fly files (*.wrm) overcomes these problems by storing the model results and the DTM separately. The water surface is then mapping the model results onto the DTM in real-time ('on-the-fly') before displaying the surface on the screen. Currently, the base DTM being mapped to must be a waterRIDE™ RASTER DTM file (*.wrr).
Please note that the real benefits of mapping on-the-fly files only apply to time-varying model results. For peak-results only model files, use the <Utilities> menu to create the mapped files.
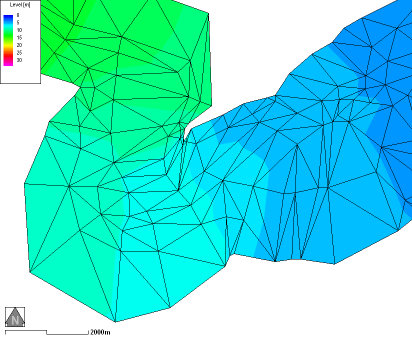
To start select <Setup On the Fly Mapping File> from the <Transfer Water Surfaces to DTM> subheading of the Utilities menu, choose the waterRIDE™ raster (*.wrr) DTM file. Then select the model results file. This file can either be a waterRIDE™ TIN (*.wrb) or a waterRIDE™ raster (*.wrr) file. After that, select a name for the mapping on-the-fly (*.wrm) file.
Normally, the DTM file will have a finer grid compared to the model results file. Only the terrain values are used from the base DTM file. The same DTM or model results file can be used by multiple mapping on-the-fly files.
When a water surface is mapped to a DTM "on the fly", a peaks dataset will be created (initialised) the first time the dataset is loaded. This may take some time.
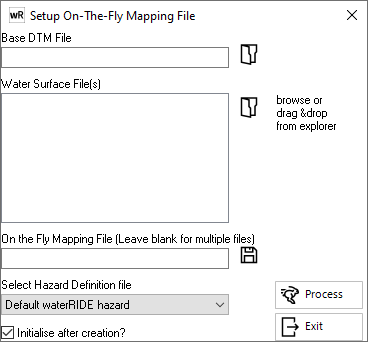
Coarse TIN Model Water Surface
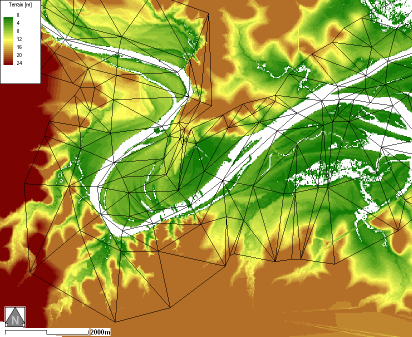
Fine Raster DTM with Coarse TIN Mesh on Top
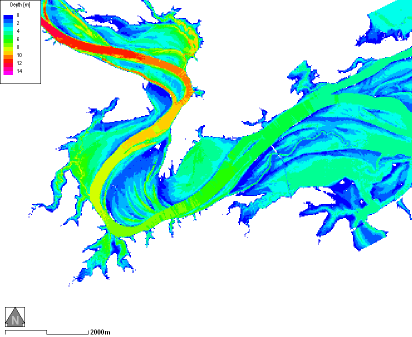
Real-time Mapped Depths